RossTalk is a simple IP-based control protocol used by many of Ross Video’s products.
Helm doesn’t have a specific RossTalk driver, but it’s very easy to issue RossTalk commands using Lua scripts.
RossTalk devices listen for incoming commands on TCP port 7788.
First, establish the TCP connection – either in the Panel’s OnStartup script, or just before sending the command.
local socket = require("socket")
local host, port = "127.0.0.1", 7788 -- Replace IP Address here
rosstalk = assert(socket.tcp())
rosstalk:connect(host,port)
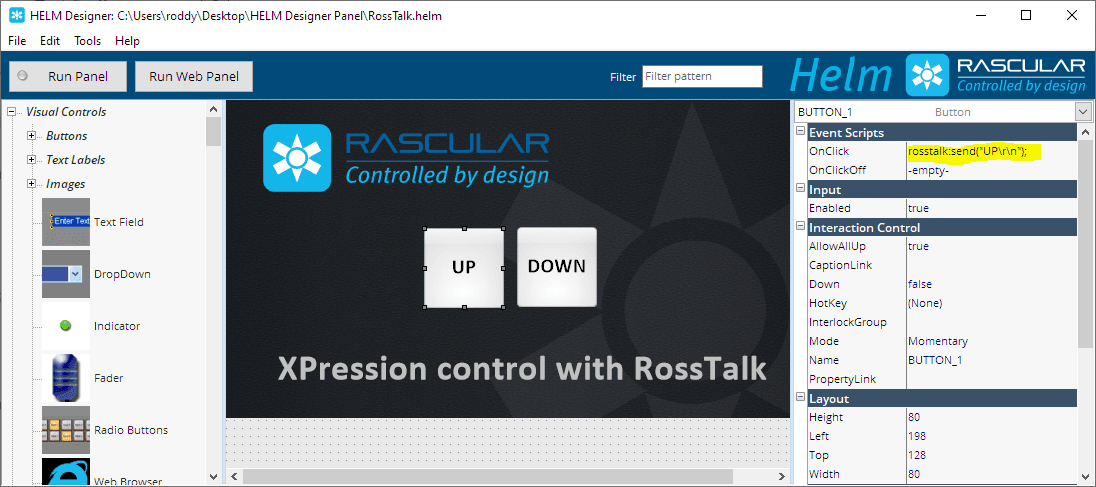
You can then send commands – which must have a “\r\n” sequence at the end to send the required newline sequence.
rosstalk:send("DOWN\r\n");
Here’s the panel shown above, which controls the XPression sequencer.
